Marine habitat mapping
The Centre for Marine Science and Technology (CMST) has expertise in:
- Seafloor and river habitat mapping and modelling
- Marine fauna detection
- Autonomous and remotely operated platforms
Seafloor and river habitat mapping and modelling
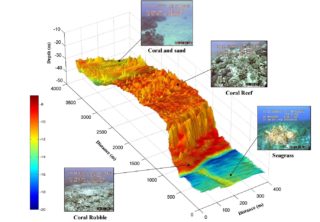
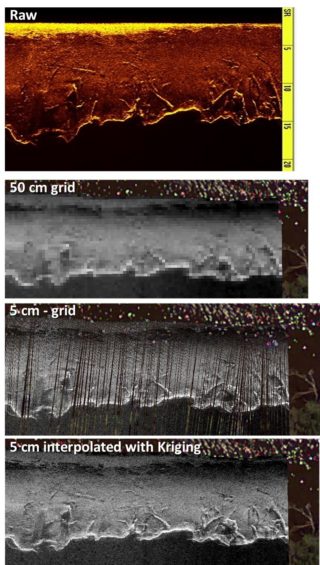
CMST has developed specialist algorithms and software for optimising echo-sounder data for seafloor habitat mapping. The centre has expertise and experience at processing different mapping technology, including multibeam (Fig 1) and single beam echo-sounders, sidescan sonar (Fig 2), to produce maps of depth, backscatter, substrate, habitat and species distribution.
Marine fauna detection
Multi-beam echo-sounders can also be set up to record data from the water column at the same time as seafloor surveys. Fig. 3 shows an example of multibeam echo-sounder data collected and processed by CMST to map a fish aggregation and the seafloor habitat in 3D. Combining seafloor and fisheries surveys is a cost-effective approach in marine resource management.

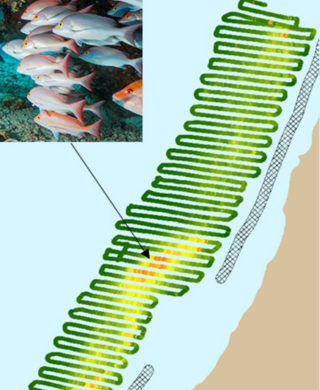
Water column data can be used to produce maps of water column targets, such as fish or seeps. Fig. 4 shows an example map of water column backscatter from a single beam survey of an Australian Marine Park. This map was used identify “hotspots” of fish activity without the need for invasive techniques, which can be important when managing marine parks.
Multibeam imagining sonars are useful for underwater detection of marine fauna. Some examples projects include crocodiles and dolphins (See videos below).
Autonomous and remotely operated platforms
CMST has carried out various marine science studies using data collected on different platforms, including ROV (Fig 5), AUV, Wavegliders.

References Selected publications
Schoeman RP, Erbe C, McCauley RD (2025) Including the invisible: deep depth-integrated chlorophyll estimates from remote sensing may assist in identifying biologically important areas in oligotrophic coastal margins. Biogeosciences 22 (4):959-974. https://doi.org/10.5194/bg-22-959-2025